ZLTECH 6.5-inch 24-48VDC 350W Rada nabo-motoro por roboto





Trajtoj
1. La nabo-motoro estas integrita servo-nabo-motora strukturo, kiu rekte integras la nabon kaj la veturantan aparaton.Ĝi havas la altan respondon kaj altan pozician precizecon de la servomotoro, ne bezonas rapidumujon, kaj estas oportuna kaj rapida instali.
2. La integra strukturo de kodilo, motoro kaj rado estas pli favora por plibonigi precizecon kaj fidindecon.
3, la instala reĝimo estas simpla, la instalado estas oportuna kaj la precizeco estas alta.
4. Elstaraj malalt-rapidaj trajtoj kaj bona stabileco.
5. Malalta bruo, kompare kun la tradicia skemo de broso aŭ senbrosa motoro + reduktilo, la muta efiko estas bona.
6. Enkonstruita kodilo, simpla drataro, forta tertrema rezisto.
7. Enkonstruita temperatursensilo povas monitori la motoran temperaturon en reala tempo, provizante diversajn protektajn mekanismojn.
Parametroj
| Ero | ZLLG65ASM250-4096 V2.0 |
| Grandeco | 6.5" |
| Pneŭo | Kaŭĉuko/PU |
| Diametro de rado (mm) | Kaŭĉuka pneŭo/PU-pneŭo: 173 |
| Ŝafto | Unuopa |
| Taksita tensio (VDC) | 24 |
| Taksita potenco (W) | 350 |
| Indicita tordmomanto (Nm) | 6 |
| Pinta tordmomanto (Nm) | 18 |
| Taksita Faza kurento (A) | 6 |
| Pinta kurento (A) | 18 |
| Taksita rapido (RPM) | 160 |
| Maksimuma rapido (RPM) | 205 |
| Poloj Ne (Paro) | 15 |
| Enkodilo | 4096 Magneta |
| Protekta nivelo | IP65 |
| Plumba drato (mm) | 600±50 |
| Izola tensiorezisto (V/min) | AC1000V |
| Izola tensio (V) | DC500V, >20MΩ |
| Ĉirkaŭa temperaturo (°C) | -20~+40 |
| Ĉirkaŭa humideco (%) | 20~80 |
| Pezo (KG) | Kaŭĉuka pneŭo/PU pneŭo: 3.75 |
| Ŝarĝo (KG/2 aroj) | 150 |
Dimensio

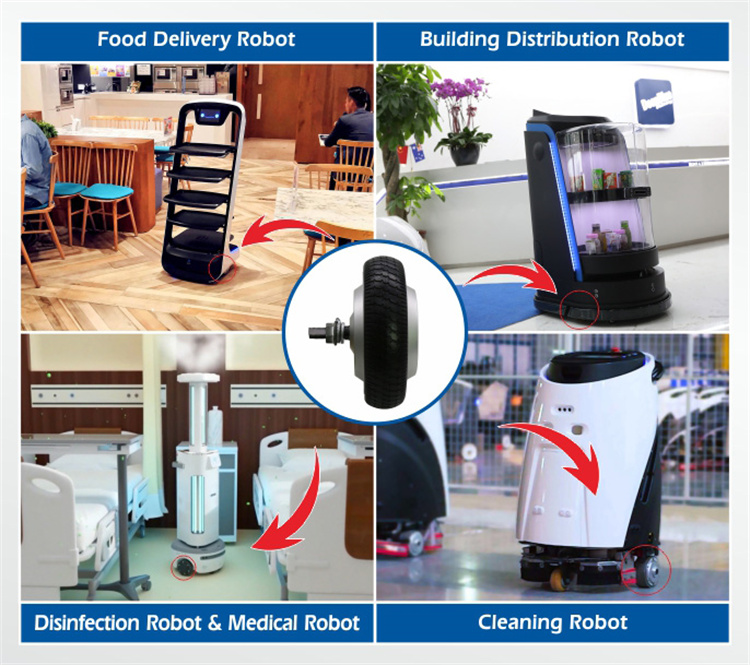
Apliko
Pakado

Produktado & Inspekta Aparato

Kvalifiko kaj Atestado

Oficejo & Fabriko

Kunlaboro
